



 Παραναστασίου 150, Χαριλάου, Θεσ/νίκη
Παραναστασίου 150, Χαριλάου, Θεσ/νίκη +30 2310 328797
+30 2310 328797
Αλγόριθμοι για ρομπότ που θα συνεργάζονται στενά χωρίς να συγκρούονται
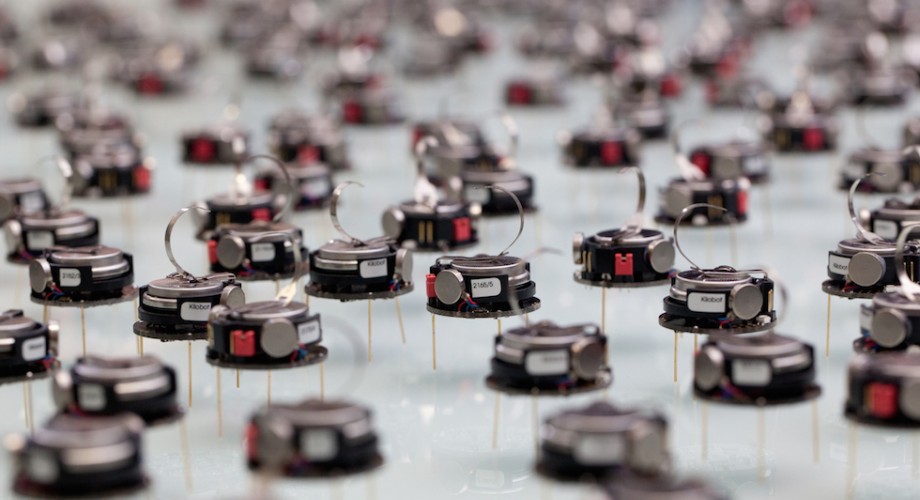
Στη ρομποτική η «συμπεριφορά» των ρομπότ καθορίζεται από τους αλγορίθμους που τα ελέγχουν, και επικεντρώνονται στις εργασίες που αναλαμβάνουν.
Οι αλγόριθμοι αυτοί περιλαμβάνουν «συμπεριφορές ασφαλείας», προκειμένου να μην τρακάρουν και συγκρούονται μεταξύ τους: Πρακτικά αυτό σημαίνει ότι κάθε ρομπότ έχει μια «φούσκα» εντός της οποίας λειτουργεί, από την οποία τα υπόλοιπα παραμένουν μακριά.
Ωστόσο, όταν τα ρομπότ είναι πολλά, προκύπτει το πρόβλημα ότι επικεντρώνονται τόσο στο να μην συγκρούονται, που τελικά σταματούν να κινούνται γενικότερα, όπως λέει ο Μάγκνους Έγκερστεντ, διευθυντής του Institute of Robotics and Intelligent Machines του Georgia Tech. «Οι συμπεριφορές ασφαλείας τους αποκτούν το πάνω χέρι και τα ρομπότ παγώνουν. Είναι αδύνατον να πάνε οπουδήποτε επειδή οποιαδήποτε κίνηση θα έκανε τις φούσκες να σπάσουν».
Η ομάδα του Εγκερστεντ δημιούργησε νέους αλγορίθμους που επιτρέπουν σε οποιονδήποτε αριθμό ρομπότ να κινηθούν σε μικρές αποστάσεις το ένα από το άλλο, χωρίς να συγκρούονται, για να ολοκληρώνουν τις εργασίες τους, αλλάζοντας θέσεις. Όπως αναφέρεται σε ανακοίνωση του Georgia Tech, πρόκειται για τους πρώτους ερευνητές που δημιουργούν τόσο «διακριτικούς» και ακριβείς αλγορίθμους ασφαλείας. «Μιλώντας με καθημερινούς όρους, μικρύναμε το μέγεθος της φούσκας του κάθε ρομπότ, για να την κάνουμε όσο πιο μικρή ήταν δυνατόν. Το σύστημά μας επιτρέπει στα ρομπότ να κάνουν τις ελάχιστες δυνατές αλλαγές στις αρχικές τους συμπεριφορές προκειμένου να ολοκληρώνουν τις εργασίες τους και να μην τρακάρουν το ένα με το άλλο».
Σε δοκιμή με τέσσερα ρομπότ, τα μηχανήματα του εργαστηρίου πλησιάζουν από τέσσερις διαφορετικές περιοχές, συναντιούνται στη μέση, κινούνται κυκλικά αντίστροφα με την κίνηση των δεικτών του ρολογιού και μετά φεύγουν προς αντίθετες κατευθύνσεις. Σε άλλη επίδειξη, οκτώ ρομπότ κάνουν το ίδιο, αυτή τη φορά κινούμενα σύμφωνα με την κατεύθυνση των δεικτών του ρολογιού. Αντί να κρατούν αποστάσεις και να κάνουν μεγάλες κινήσεις για να αποφύγουν τους «γείτονές» τους, τα ρομπότ κινούνται πολύ ανεξάρτητα όποτε είναι επιθυμητό.
Η αποφυγή συγκρούσεων δεν είναι κάτι καινούριο στη ρομποτική- ενδεικτικά, τα αυτόνομα οχήματα της Google και άλλων εταιρειών έχουν ιστορικά ελάχιστων, ή και καθόλου συγκρούσεων. «Αλλά δεν έχουμε δει χιλιάδες αυτόνομα οχήματα στον δρόμο ακόμα…τα ρομπότ είναι πολύ συντηρητικά, θέλουν να διασφαλίζουν πως είναι ασφαλή. Δεν θα μπορούσες να γεμίσεις τον δρόμο με αυτόνομα αυτοκίνητα με τη σημερινή τεχνολογία» λέει ο Έγκερστεντ, προσθέτοντας ότι κάτι παρόμοιο με αυτούς τους αλγορίθμους θα μπορούσε να χρησιμοποιηθεί και στη νέα γενιά συστημάτων ελέγχου εναέριας κυκλοφορίας.
ΠΕΡΙΣΣΟΤΕΡΑ ΝΕΑ
Δωρεάν Τμήματα Γνωριμίας με τη Ρομποτική
Έναρξη Τμημάτων Γνωριμίας με τη Ρομποτική. Δώστε τη δυνατότητα στα παιδιά σας να γνωρίσουν τα Εκπαιδευτικά ...

Ρομποτική για Νήπια Νέα Τμήματα
Νέα τμήματα 2024. Δηλώστε ενδιαφέρον στη φόρμα για να σας καλέσουμε. Δώστε στα παιδιά σας τη δυνατότητα να κάνουν τα ...

Air Quality Analyzer - By Υδρόγειος Kids CODELAB
Air Quality Analyzer - By Υδρόγειος Kids CodeLab Ένα από τα μεγαλύτερα προβλήματα των μεγάλων αστικών περιοχών ...
ΚΑΤΗΓΟΡΙΕΣ ΝΕΩΝ

